Условия размещения и площадки для размещения статей смотрите здесь
Глава VI. Якорно-швартовые устройства
37. Автоматическая швартовая лебедка с электроприводом
Автоматические швартовные лебедки выполняются с электрическим или
гидравлическим приводом. Лебедки с электрическим приводом, установленные
на судах типа "Скульптор Коненков", "Художник Сарьян", "Астрахань" и
др., имеют одинаковый принцип действия при некоторых различиях в
конструкции.
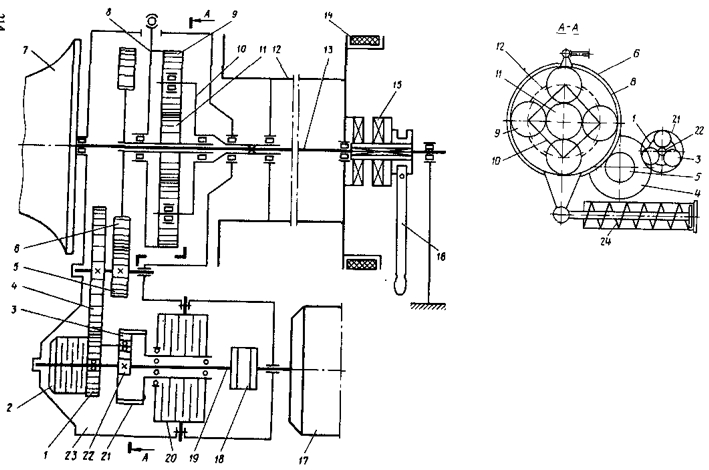
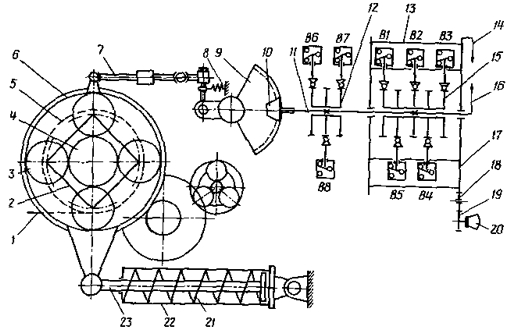
Автоматическая швартовная лебедка фирмы "Товимор" (ПНР) (рис. 141)
состоит из швартовного барабана 12 и турачки 7, приводимых
электродвигателем 17 через редуктор 23. Швартовный барабан свободно
сидит на пустотелом валу водила 10 и рабочем валу 13 и соединяется с
последним кулачковой муфтой 15, подвижная полумуфта которой перемещается
рукояткой 16 по валу шестигранной формы. Ленточный тормоз 14 удерживает
барабан от вращения при выключенной кулачковой муфте. Турачка 7 жестко
сидит на рабочем валу и вращается на всех режимах работы швартовной
лебедки. Предусматривается возможность установки якорной приставки
вместо турачки.
Редуктор 23 двухскоростной, может работать в номинальном и ускоренном
режимах. Последний используется для выбирания ненагруженного каната.
Электродвигатель 17 с переключением числа пар работающих полюсов имеет
три частоты вращения для каждого из указанных режимов работы редуктора
(см. табл. 4). Наибольшее тяговое усилие на барабане 122,6 кН, на
турачке - 108,9 кН.
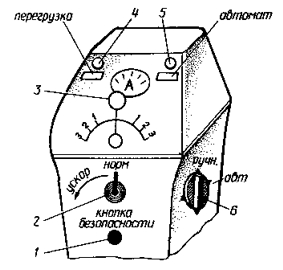
Управление электродвигателем 17 и редуктором 23 в ручном режиме
осуществляется от колонки командоконтроллера (рис. 142). Ручной или
автоматический режим работы устанавливаются переключателем 6,
расположенным на боковой стенке колонки. Для работы швартовного барабана
в режиме ручного управления необходимо включить кулачковую муфту 15 (см.
рис. 141) и отпустить тормоз 14. Исходное положение рукоятки 3 (см. рис.
142) командоконтроллера соответствует положению "стоп", отклонение
рукоятки влево соответствует режиму "травить", вправо - "выбирать".
Каждый из указанных режимов имеет три скорости, включаемые рукояткой
последовательно.
Включение редуктора на нужный режим работы производится рукояткой 2
Исходное положение рукоятки соответствует включению редуктора на
номинальный режим работы, отклонение рукоятки влево и удержание ее в
этом положении приводят к переключению редуктора на ускоренный режим.
Отпущенная рукоятка 2 возвращается пружиной в исходное положение.
Кнопка безопасности I служит для экстренной остановки электродвигателя.
Сигнальная лампа 4 загорается при перегрузке, сигнальная лампа 5- при
включении автоматического режима.
В автоматическом режиме управление лебедкой осуществляется
командоконтроллером, встроенным в корпус редуктора. Командоконтроллер
автоматически включает электродвигатель на режим "травить" при
увеличении натяжения каната и на режим "выбирать" при уменьшении
натяжения по сравнению с заданным на 20-30 кН и останавливает
электродвигатель при достижении заданного усилия натяжения.
Рис. 141. Автоматическая швартовная лебедка с
электроприводом фирмы "Товимор"
Рис. 142. Колонка командоконтроллера лебедки
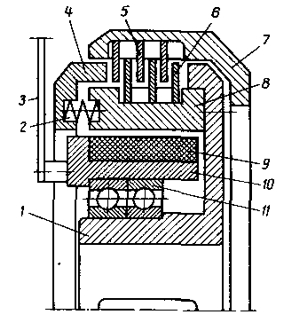
Рис. 143. Электромагнитная дисковая
Для работы турачкой необходимо включить тормоз 14 (см. рис. 141) и
разобщить муфту барабана 15. Переключатель 6 (см. рис. 142) установить
на ручной режим работы.
Редуктор 23 (см. рис. 141) смонтирован в литом корпусе и представляет
собой четырехступенчатую зубчатую передачу. Первая ступень (планетарная
передача 21,22,3 с дисковой электромагнитной муфтой 2 и дисковым
электромагнитным тормозом 20) обеспечивает, включение номинального или
ускоренного режима. Вторая и третья ступени состоят из косозубых
цилиндрических шестерен 1, 4, 5, 6. Четвертая планетарная ступень 8, 9,
10, 11 передает крутящий момент на рабочий вал 13 лебедки и выполняет
функцию силоизмерительного устройства. Это устройство измеряет значение
усилия, на которое натяжение каната отклоняется от заданного, и передает
механический управляющий сигнал на командоконтроллер автоматического
режима.
Электромагнитная дисковая муфта (рис. 143) ступицей / устанавливается на
валу первой ступени редуктора на шпонке или шлицах. К ступице крепится
втулка 8, в пазах которой в осевом направлении могут перемещаться
внутренние фрикционные диски 6. С ними чередуются наружные диски 5
корпуса 7, на который при сжатых дисках передается крутящий момент.
Сжатие дисков выполняется якорем 4 под действием электромагнитного поля
катушки 10 с обмоткой 9. Катушка установлена на ступице на подшипниках
11 и токоподводящим устройством 3 удерживается от вращения. При
отсутствии питания якорь 4 отжимается пружинами 2, сжатие пластин
ослабевает.
Остаточный крутящий момент в выключенном положении составляет 0,5-3,0 %
номинального. Муфта, разомкнутая при отсутствии питания в катушке
электромагнита, называется нормально разомкнутой.
Дисковый фрикционный тормоз 20 (см. рис. 141) имеет аналогичный принцип
действия, но является нормально замкнутым: при отсутствии питания
фрикционные пластины сжимаются сильными пружинами, воздействующими на
них через якорь, и тормоз удерживает от вращения зубчатый венец 21.
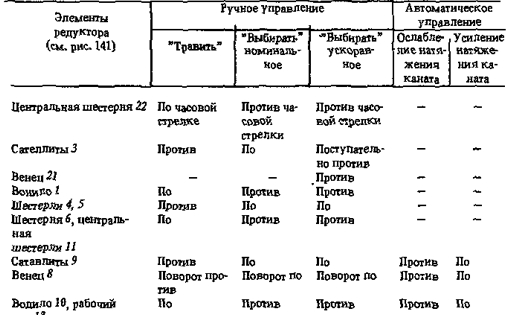
В номинальном режиме дисковая муфта 2 разомкнута, а тормоз 20 замкнут,
так как питание к обмоткам катушек не подводится. Вращение от
электродвигателя 17 через эластичную муфту 18 передается на центральную
шестерню 22 и три сателлита 3, которые обегают по зубьям заторможенного
венца 21 и вращают шестерню 1, являющуюся водияом планетарной передачи.
Вращение через вторую и третью ступени передается на пустотелый вал
шестерни 6 и сидящую на нем центральную шестерню И планетарной передачи
четвертой ступени. Зубчатый венец 8 этой передачи удерживается от
вращения пружиной 24 силоизмерительного устройства. Вращение от
центральной шестерни 11 передается четырем сателлитам. 9, обегающим по
зубьям венца 8 в сторону, противоположную их вращению. Сателлиты 9,
перемещаясь поступательно, вращают водило 10 и жестко соединенный с ним
рабочий вал 13 лебедки.
При включении ускоренного режима питание подводится к электромагнитам
муфты 2 и тормоза 20, при этом муфта будет замкнута, а тормоз разомкнут.
Шестерня i соединяется с валом 19 и выключит планетарную передачу,
поскольку шертерни 22 к I, вращаясь с одинаковой частотой, будут
переносить сателлиты 3 по кольцевой орбите без вращения вокруг своих
осей. Вместе с сателлитами будет вращаться зубчатый венец 21. Таким
образом все элементы передачи оказываются жестко связанными между собой
и ее передаточное число становится равным единице. При неизменном
передаточном числе второй, третьей и четвертой ступеней частота вращения
барабана 12 и турачки 7 увеличивается. Направление движения элементов
редуктора поясняется в табл. 6.
Командоконтроллер автоматического режима лебедки (рис. 144) состоит из
двух кулачковых барабанов 12 и 15, жестко сидящих на валу 11. При
повороте вала кулачки воздействуют на микровыключатели В1 - В8,
замыкающие электрические цепи управления, блокировки и сигнализации.
Микровыключатели В6, В7, В8 закреплены в корпусе неподвижно.
Микровыключатели Bl, В2, ВЗ, В4, В5 установлены на подвижной траверсе
13. При вращении рукоятки 20 через шестерни 19 и 18 зубчатый диск 17
поворачивает траверсу 13 относительно вала II. Стрелка 14 при этом
перемещается по шкале указателя, фиксируя заданное усилие натяжения
каната.
Baл 11 командоконтроллера приводится от зубчатого венца 6 редуктора
через систему рычагов 7, с возвратной пружиной 8, зубчатый сектор 9 и
коническую шестерню 10. При натяжении каната 1, сходящего с нижней части
барабана 5, зубчатый венец 6 поворачивается по часовой стрелке (со
стороны турачки) и перемещает шток 23, сжимая пружину 21 в цилиндре 22
силоизмерительного устройства до усилия, пропорционального усилию
натяжения каната. При этом стрелка 16, поворачиваясь с валом И,
фиксирует на шкале указателя фактическое усилие натяжения каната.
Таблица 6. Движение элементов редуктора при различных режимах
работы
Для перехода на режим автоматического управления после установки
стрелки 14 на заданное усилие натяжения каната включают лебедку на режим
ручного управления и выбирают канат до совмещения стрелки 16 со стрелкой
14 на шкале указатели. Это положение соответствует исходной позиции
кулачковых барабанов 12 и 15 относительно микровыключателей В6 - В8, В1
- В5 при заданном усилии Натяжения каната.
При ослаблении натяжения на 20-30 кН пружина 21 силоизмерительного
устройства повернет венец 6 и вал И против часовой стрелки. Кулачок
барабана 15 замкнет микровыключатель 82 и включит лебедку на режим
"выбирать" на первую скорость. При большой слабине каната пружина
продолжит поворот кулачкового барабана 15 и последовательно замкнет
контакты микровыключателей В4 и В5, включая вторую и третью скорости.
При натяжении каната до заданного усилия венец 6, пружина 21, кулачковый
барабан 15 и стрелка 16 вернутся в исходное положение и электрические
цепи управления разомкнутся.
Рис. 144. Автоматическая система управления
лебедкой
При увеличении натяжения на 20-30 кН швартовный канат повернет
барабан 5 лебедки, водило 2 с сателлитами 3 и зубчатый венец 6 по
часовой стрелке относительно неподвижной шестерни 4, увеличив сжатие
пружины 21. Кулачковый барабан 15 тоже повернется по часовой стрелке,
замкнув контакты микровыключателя ВЗ. Нормально замкнутый тормоз
электродвигателя при этом разомкнётся, но пуск электродвигателя
останется заблокированным. Канат будет вытравливаться под действием
внешнего усилия, вращая барабан, все отупели редуктора и якорь
электродвигателя.
Если натяжение каната будет ослабевать, пружина 21 возвратит венец 6 и
кулачковый барабан 15 в исходное положение. Если же интенсивность
натяжения каната превысит скорость его вытравливания, произойдет
дальнейший поворот венца 6 и кулачкового барабана 15, последовательно
замкнутся контакты микровыключателей В4 и В5, включив вторую и третью
скорости электродвигателя в режим "травить". По мере ослабления
натяжения каната пружина 21 будет разжиматься, возвращая венец 6,
кулачковый барабан 15 и стрелку 16 в исходное положение, при котором
электрические цепи управления разомкнутся.
Остальные микровыключатели имеют следующее назначение: В1 - подготовка
цепи управления при включении автоматического режима; В6, В8 -
сигнализация перегрузки при номинальном и ускоренном режимах работы; В7
- отключение цепей управлении в автоматическом режиме при перегрузке.