|
|
||||
 |
Все про подводную технику, акваланги, аппараты погружения, декомпрессионные камеры, барокамеры, подводные лаборатории |
 |
||
|
29.03.2018 19:45 - дата обновления страницы |
Герхард Хаукс. Подводная техника |
|
||
|
Арендные активные ссылки на сайт
|
Условия размещения и площадки для размещения статей смотрите здесь Глава 9. Подводные аппараты с водолазными отсеками 9.5. Системный подход к созданию единого комплекса обеспечивающее судно-подводный аппарат Движители и подруливающие устройства Требуемая маневренность достигается целесообразным размещением
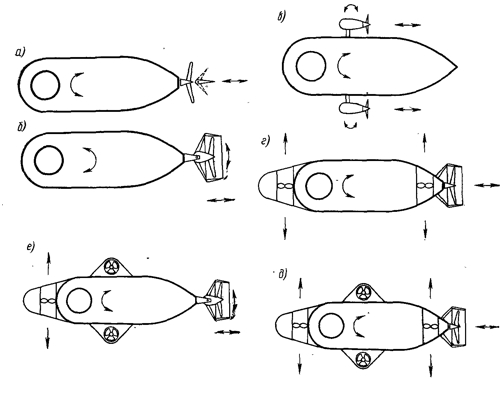
движителей и подруливающих устройств (рис. 9.7). Лишь наклонение
аппарата в продольной плоскости (дифферент) обеспечивается независимой
от движителей дифферентной системой.
Рис. 9.7. Варианты расположения движителей и подруливающих устройств: а - фиксированное положение гребного винта (управление аппаратом происходит за счет вертикального руля в корме); б - гребной винт в поворотной насадке (обеспечивается возможность поворота вокруг вертикальной оси без хода); в- гребные винты на поворотных кронштейнах по бортам (могут действовать независимо друг от друга); е - фиксированное положение гребного винта в насадке (имеются подруливающие устройства в носу и корме); д - фиксированное положение гребного винта в насадке (имеются носовое и кормовое подруливающие устройства и вертикальные винты по бортам); е - гребной винт в поворотной насадке (имеются носовое подруливающее устройство и вертикальные винты по бортам). До сих пор речь шла об электроприводах на постоянном токе.
Разумеется, двигатели переменного тока проще по конструкции и надежнее в
эксплуатации, хотя требуют установки дополнительных устройств
(преобразователей и пр.). Полупроводниковая техника позволит легко
преодолеть это затруднение, но все же преобразователи занимают довольно
много места, поскольку должны устанавливаться на каждом
электродвигателе. Так что пока электродвигателями переменного тока
оснащаются лишь подводные аппараты большого водоизмещения (например,
типа "Бен Франклин"),
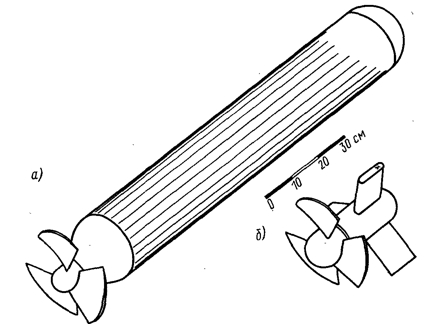
Рис. 9.8. Сравнительные размеры электрического (а) и гидравлического (б) приводов равной мощности. Стандартные гидромоторы не годятся для использования в подводных условиях (из-за отсутствия на них соответствующих уплотнений). Необходимо либо заменять эти уплотнения, либо обеспечить замкнутый режим работы под давлением, несколько превосходящим забортное. На глубинах свыше 1000 м предпочтителен первый способ (замена уплотнений). Он успешно проверен на аппаратах типа "Мермэйд". Следует подчеркнуть большое удобство гидравлических систем для приводов других механизмов и устройств на подводном аппарате (выдвижных опор, манипуляторов, рабочих инструментов и т. д.). Читать предыдущую страницу Читать книгу с начала Читать следующую страницу
Интересные книги: Как отмыть днище катера, яхты, лодки, любого водного транспорта от тины и водорослей? Как применять краски необрастайки и самополирующие краски для окраски бортов днища катеров и яхт Интересное про подводную технику и погружения под воду Эксплуатация судовых устройств и корпуса Триста полезных советов владельцам катеров и яхт Постройка судна с нуля, проекты катеров и яхт Постройка яхты, яхты из различных материалов Катодная защита судов от коррозии Моторная лодка пособие для любителя Управление маломерным судном и гидроциклом Катера, лодки и моторы в вопросах и ответах Автомобильные двигатели на катерах и лодках Пионерская судоверфь, строим катер и яхту своими руками
|
|||
| На страницу размещенных статей | ||||
|
|
||||
|
Купить химию для железнодорожного транспорта Моем катер, яхту, лодку Ремонт катеров, яхт, лодок, судовых установок Купить детергенты для мойки дорог, домов
|
||||