Схема цепи управления электровоза переменного тока
Как и на электровозах постоянного тока, цепи управления на
электровозах переменного тока можно разделить на ве части: цепи
управления тяговыми двигателями и вспомогательные цепи управления.
На электровозах переменного тока основным аппаратом, с помощью
которого производят необходимые переключения в цепи управления, а
следовательно, и в силовой цепи, также является контроллер
машиниста. Цепи управления питаются постоянным током напряжением 50
В от генераторов управления или от статических выпрямителей.
На электровозах ВЛ80Т, ВЛ80С, ВЛ80Р с электрическим торможением
контроллер имеет три вала: главный, реверсивный и тормозной.
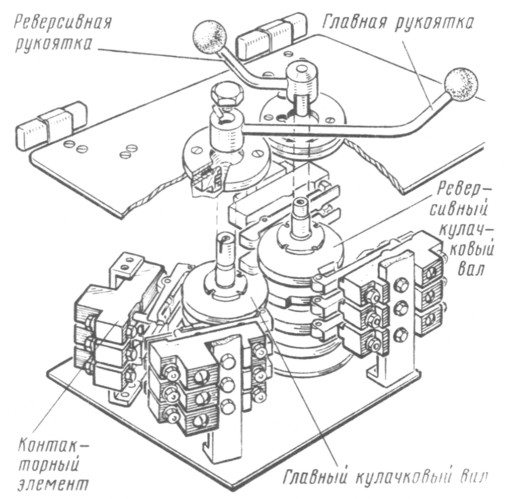
На электровозах без электрического торможения (ВЛ60К, ВЛ80К)
контроллер машиниста (рис. 90) выполнен с двумя валами: главным и
реверсивным, совмещенным с валом ослабления возбуждения. Контроллер
имеет две рукоятки управления - съемную реверсивную и главную.
С помощью реверсивной рукоятки машинист изменяет направление
движения локомотива, включает или выключает ступени ослабления
возбуждения. В соответствии с этим реверсивная рукоятка может
занимать следующие положения (рис. 91): 0 -- нулевое; ПВ - полное
возбуждение для движения назад; ПВ - полное возбуждение для движения
вперед; OBI, ОВ2, ОВЗ - ступени ослабления возбуждения для движения
вперед. При этом включаются или выключаются контакторы ослабления
возбуждения, шунтирующие секции резисторов в этих цепях (см. рис.
68). Как и на электровозах постоянного тока, реверсивная и главная
рукоятки во избежание ошибочных действий машиниста сблокированы.
Управление силовой цепью электровоза переменного тока сводится к
управлению с помощью главной рукоятки серводвигателем СМ (см. рис.
57, 58, 91) главного контроллера: его ручному или автоматическому
пуску, фиксации (остановке) серводвигателя на какой-либо позиции,
его реверсированию, сбросу позиций и фиксации на позициях сброса.
Пуск серводвигателя, его реверсирование, электрическое торможение
осуществляются с помощью контакторов 208 и 206 (на рис. 91 сохранена
нумерация аппаратов, присвоенная заводом-изготовителем), замыкающие
и размыкающие контакты которых включены в его цепь. (Напомним, что
все контакты на рис. 91 показаны в положении, соответствующем
отсутствию тока в аппаратах.) В необходимых случаях с помощью
главной рукоятки можно быстро выключить главный выключатель силовой
цепи.
В соответствии со сказанным главная рукоятка контроллера машиниста
электровоза может занимать восемь позиций: 0 - нулевая; БВ - быстрое
выключение главного выключателя; АВ - автоматическое выключение; РВ
- ручное выключение; ФВ - фиксация выключения; ФП - фиксация пуска;
РП - ручной пуск; АП - автоматический пуск.
Машинист при подготовке электровоза к пуску включает кнопку Цепь
управления и замыкает специальным ключом контакт 213 блокировочного
устройства тормозов, в результате чего подается напряжение 50 В в
цепь управления контроллера. Затем машинист ставит главную рукоятку
на позицию 0. Если при этом вал одного из двух главных контроллеров
находится не на нулевой позиции (машинист управляет двумя главными
контроллерами, расположенными в каждой секции локомотива), то через
ряд блокировок замыкается цепь катушки контактора 208. Тогда
включается его замыкающий контакт и выключается размыкающий в цепи
серводвигателя. На позиции 0, как видно из развертки кулачковых шайб
главного вала контроллера машиниста, катушка контактора 206
обесточена и его размыкающие контакты в цепи серводвигателя СМ
включены так, что двигатель вращается в сторону сброса позиции. Как
только вал главного контроллера установится в нулевую позицию,
специальная блокировка прервет цепь катушки контактора 208, контакты
которого разорвут цепь питания двигателя СМ и накоротко замкнут
обмотку его якоря. В результате начнется электрическое торможение
двигателя СМ.
Затем машинист переводит главную рукоятку контроллера в положение
фиксации пуска ФП, контактор 206 включится и его контакты подготовят
цепь якоря серводвигателя СМ к тому, что при замыкании его цепи
контактами контактора 208 он начнет вращаться в направлении,
соответствующем набору позиций. Контактор 208 включится при переводе
главной рукоятки контроллера из положения ФП в положение РП и
серводвигатель повернет вал группового переключателя на одну позицию
набора.
Как только этот поворот завершится, соответствующие блокировки
прервут цепи питания катушки контактора 208 и его размыкающие
контакты замкнут накоротко якорь серводвигателя СМ. Для набора
следующей позиции машинист должен поставить главную рукоятку снова в
положение ФП, чтобы подготовить цепь якоря серводвигателя, и затем
перевести рукоятку в положение РП. Переводя рукоятку с позиции на
позицию, машинист следит за показаниями амперметра, чтобы не
допустить перегрузки тяговых двигателей.
Машинист может осуществлять и автоматический пуск локомотива. Для
этого он должен поставить главную рукоятку в положение АП. В этом
случае через катушку контактора 208 будет проходить ток до тех пор,
пока машинист удерживает главную рукоятку в положении АП (это
положение рукоятки нефиксированное). При этом двигатель СМ будет
вращаться в направлении, соответствующем набору позиций. На
последней, 33-й, позиции специальные блокировки разорвут цепь
катушки 208. При наборе позиций катушка контактора 206 находится под
током.
Сброс позиций, так же как и пуск, может быть осуществлен вручную или
автоматически. Для ручного сброса машинист ставит рукоятку
поочередно в положения РВ и ФВ, для автоматического - в положение АВ.
При сбросе позиций катушка контактора 206 обесточена.
Следовательно, при автоматическом пуске или сбросе скорости машинист
только ставит главную рукоятку контроллера в соответствующее
положение, а все необходимые переключения производятся
автоматически, без его участия. При разгоне электровоза с составом
до необходимой скорости ток в тяговых двигателях не должен превышать
значения, ограничиваемого условиями сцепления или коммутацией
двигателей.
Необходимые переключения в процессе автоматического пуска или
снижения скорости могут происходить в зависимости от изменения тока.
Этот способ используют в пригородных электропоездах, где масса
состава, а следовательно, и начальное значение тока при пуске
изменяются сравнительно мало.
Масса грузовых составов, а значит, и зависящий от нее ток
электровоза могут меняться в широких пределах. Осуществить
автоматический пуск грузового электровоза в зависимости от изменения
тока трудно. Поэтому необходимые переключения при пуске и снижении
скорости производят через равные промежутки времени независимо от
нагрузки двигателей. Промежутки времени, через которые происходит
переход с одной позиции на другую, определяются частотой вращения
серводвигателя и передаточным числом механизмов передачи от
серводвигателя до кулачкового вала контакторов переключения ступеней
(см. рис. 58). Такой способ автоматического управления называют
хронометрическим. Безусловно, и при этом способе управления ток в
двигателях не должен превышать максимального допустимого.
Машинист в процессе как автоматического, так и ручного пуска должен
следить за показаниями амперметра, включенного в цепь тяговых
двигателей. Если ток превышает допустимый, он ставит главную
рукоятку контроллера в положение ФП, т. е. приостанавливает
автоматические переключения в силовой цепи, фиксируя вал главного
контроллера на какой-либо промежуточной ступени регулирования.
Если кулачковый вал контакторов переключения ступеней случайно
застрянет между позициями, реле времени, которое имеет выдержку 2-3
с, своими контактами разорвет цепь удерживающей катушки главного
выключателя, и он отключится.
Машинисту необходимо знать, на какой позиции находится вал главного
контроллера в процессе автоматического или ручного набора, а также
сброса позиций. Поэтому в каждой кабине управления установлен
указатель позиций (см. рис. 91). Стрелка указателя позиций связана с
устройством, носящим название сельсин-приемника. Сельсин-приемник
электрически соединен с сельсин-датчиком. Обмотки статоров
сельсин-датчика и сельсин-приемника питаются однофазным переменным
током напряжением 110 В от специального трансформатора напряжения,
подключенного к вспомогательной обмотке тягового трансформатора (см.
рис. 80). Роторы сельсин-приемника и сельсин-датчика имеют
трехфазные обмотки, электрически соединенные одна с другой. Ротор
сельсин-датчика механически связан зубчатой передачей с валом
серводвигателя (см. рис. 58; на рис. 91 условно показано, что ротор
соединен с валом серводвигателя непосредственно) .
Обмотки статоров сельсинов (см. рис. 80) создают пульсирующие
магнитные потоки, которые наводят в трехфазных обмотках роторов
равные э. д. с. При повороте вала главного контроллера, а
следовательно, и ротора сельсин-датчика равенство э. д. с.
нарушается и по соединительным проводам проходит ток. Это заставляет
ротор сельсин-приемника повернуться точно на такой же угол, на какой
повернулся сельсин-датчик. Тогда равенство э. д. с.
восстанавливается.
В схеме управления силовой цепью, как видно из рис. 91, используется
много контактов и катушек реле, блок-контактов контакторов. Все они
выполняют различные защитные и контрольные функции, например,
контролируют включение двигателей вентиляторов, охлаждающих
выпрямители, температуру масла в баке тягового трансформатора и т.
п. Подробно их действие описывается для электровозов каждой серии в
специальных руководствах по эксплуатации.