Как уже было сказано, регулировать частоту вращения тяговых
двигателей при неизменном подводимом напряжении можно, изменяя
магнитный поток возбуждения тяговых двигателей.
В двигателях последовательного возбуждения, у которых ток якоря
проходит и по обмотке возбуждения, возможно только уменьшать
магнитный поток, что принято называть ослаблением возбуждения'
двигателей. В этом случае при той же частоте вращения увеличивается
ток якоря, а следовательно, и мощность, потребляемая из контактной
сети. Ослабление возбуждения2 осуществляют двумя способами:
отключением части витков обмотки возбуждения (рис. 41, а) и
включением параллельно ей регулируемого резистора (рис. 41, б).
Первый способ, ввиду того что усложняется конструкция тяговых
двигателей, не нашел применения на электровозах. Для осуществления
его необходимо вывести дополнительные провода от обмотки возбуждения
и обязательно отключить от нее часть витков, а не шунтировать их.
Если этого не сделать, в шунтированных витках при изменении тока
будет наводиться э. д. е., препятствующая изменению основного тока
возбуждения. Поэтому включая контактор 2 (см. рис. 41, а), отключают
контактор 1.
На электровозах включают резистор параллельно обмотке
возбуждения. При этом сравнительно просто получить несколько
ступеней ослабленного возбуждения, изменяя сопротивление
шунтирующего резистора, для чего его разбивают на несколько секций.
Включаюти отключают секции таких
резисторов, как и пусковых, индивидуальными контакторами. При
включении контактора / (см. рис. 41, б) параллельно обмотке
возбуждения в цепь вводится полностью весь резистор. Замкнув
контактор 2, а затем при необходимости контактор 3, ступенями
уменьшают сопротивление резистора.
На отечественных электровозах применяют от двух до четырех ступеней
ослабленного возбуждения. Осуществлять ослабление возбуждения
машинист может при последовательном, последовательно-параллельном и
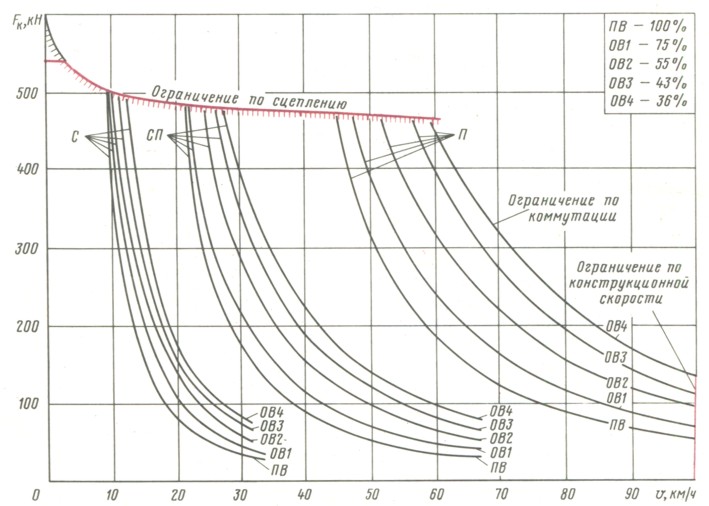
параллельном соединениях двигателей. Таким образом, при трех ходовых
характеристиках с полным возбуждением (ПВ) и четырех ступенях
ослабления возбуждения (OBI, ОВ2, ОВЗ, ОВ4) электровоз имеет 15
ходовых безреостатных позиций. Для каждой ходовой позиции строится
своя тяговая характеристика. Так, на рис. 42 показаны в качестве
примера тяговые характеристики электровоза ВЛ10,
соответствующие 15 ходовым позициям при напряжении в контактной сети
3000 В.
Развиваемая сила тяги электровоза ограничивается прежде всего
сцеплением колес с рельсами. Проектируя и изготовляя локомотив,устанавливают так называемую конструкционную скорость
электровоза, т. е. максимальную ' скорость, при которой не
нарушается его нормальная работа. Для электровоза ВЛ10
конструкционная скорость равна 100 км/ч. Поэтому на тяговых
характеристиках электровоза нанесено ограничение по скорости 100
км/ч при параллельном соединении.
Как видно из рис. 41,6, последовательно с резистором включен так
называемый индуктивный шунт ИШ. Необходимость его применения
вызывается следующим. Кратковременно контактная сеть может быть
отключена от тяговой подстанции; возможны также кратковременные
отрывы токоприемника от контактного провода, после чего тяговые
двигатели вновь включаются на полное напряжение. Ток в якорях
двигателей при этом резко нарастает. Однако обмотки возбуждения
двигателей обладают большим индуктивным сопротивлением, и поэтому
большая часть тока идет через резистор, а меньшая - через обмотки
возбуждения. Из-за этого увеличение магнитного потока и э. д. с. в
обмотке якоря происходит со значительным запаздыванием относительно
увеличения тока, поэтому под действием реакции якоря в сильной
степени искажается магнитное поле возбуждения. В результате этого
возникнетискрение под щетками, которое
может перейти в круговой огонь.
Чтобы обеспечить заданное распределение тока между обмотками
возбуждения и резисторами, применяют индуктивные шунты, обладающие
индуктивным сопротивлением, соизмеримым с индуктивным сопротивлением
обмотки возбуждения.