Казалось, что может быть проще пуска электрического двигателя, в
том числе и тягового? Стоит только, например, быстродействующим
выключателем подключить двигатель к источнику электрической энергии,
и якорь его начнет вращаться. Но в действительности все не так
просто. В момент пуска якорь двигателя неподвижен и в обмотке его не
индуцируется э. д. е., уравновешивающая подведенное напряжение.
Поэтому в первое мгновение при неподвижном якоре пусковой ток
зависит только от значения приложенного напряжения Uс и
сопротивления Rд обмоток двигателя. Это
сопротивление невелико. Так, для тягового двигателя электровоза ВЛ10
оно при температуре 20° С составляет 0,025 + 0,0365 + + 0,0317 =
0,0932 Ом (сумма сопротивлений обмоток главных полюсов,
дополнительных полюсов, компенсационной обмотки и обмотки якоря). На
электровозах постоянного тока всегда соединены последовательно как
минимум два двигателя. При подключении к контактной сети, как
показано на рис. 9, через их обмотки пойдет ток
I = 3000/2/0,0932=16 000 А.
На такой ток, как мы уже знаем, и двигатели, и оборудование
электровоза не рассчитаны. Быстродействующий выключатель на
электровозе ВЛЮ отрегулирован на ток 3100 А, и поэтому в момент
пуска он разорвет цепь тяговых двигателей. Чтобы ограничить пусковой
ток, все двигатели электровоза перед пуском соединяют
последовательно. При этом к двигателю приложено напряжение
Uд = Uc/N2,
где nд - число последовательно соединенных
двигателей в цепи электровоза.
Кроме того, для ограничения тока в цепь дополнительно вводят
пусковой реостат, сопротивление которого можно регулировать.
При пуске с заданным и неизменным пусковым током
In напряжение Uд, подводимое к каждому из последовательно
соединенных двигателей, уравновешивается э. д. с. и падением
напряжения в реостате и обмотках тяговых двигателей:
Uд = Е + In*R +
In*Rд.
Если скорость равна нулю, то э. д. с. также равна нулю, поскольку Е=
сФv, и максимальное сопротивление
пускового реостата R определяется заданным значением пускового тока:
R=Uc/In/nд
С увеличением скорости движения в тяговых двигателях будет
наводиться возрастающая э. д. с. При этом ток двигателей, сила тяги
и, как следствие, ускорение начнут уменьшаться. Для обеспечения
примерно постоянного ускорения нужно уменьшать сопротивление
реостата так, чтобы ток двигателей и касательная сила тяги
оставались постоянными. При больших мощностях тяговых двигателей и
значительных токах трудно осуществить плавное реостатное
регулирование. Поэтому применяют ступенчатое: выключают отдельные
секции реостата с помощью аппаратов, называемых индивидуальными
контакторами. Контакты К1 и К2 индивидуальных контакторов показаны
на рис. 9. Если замкнуть контакты К1 контактора, то одна секция
пускового реостата будет выведена из цепи тяговых двигателей и
напряжение, подводимое к ним, повысится. При замыкании контактов К2
к тяговым двигателям подводится напряжение контактной сети.
Вполне понятно, что для обеспечения более или менее плавного пуска и
тем самым уменьшения колебаний тока двигателя (силы тяги) следует
сопротивление пускового реостата изменять небольшими ступенями.
Однако при этом необходимо иметь большое число контакторов, что
усложняет силовую цепь.
Ступени пускового реостата рассчитывают исходя из наибольшего
допустимого тока тяговых двигателей. Ток, при котором выключается
очередная секция пускового реостата, определяют исходя из так
называемого коэффициента неравномерности пускового тока, который в
свою очередь зависит от заданного ускорения. Таким образом, пусковой
ток не постоянен, а колеблется в пределах от максимального
Iпmax до минимального
In min значения. В расчетах применяют среднее арифметическое
In этих значений.
Кроме рассмотренных ступеней реостата, предусматривают также
ступени, называемые маневровыми. Они позволяют в начале пуска
увеличивать силу тяги по возможности плавно, без толчков, особенно
при трогании тяжелых составов. К счастью, поезд не представляет
собой жестко связанного целого: сцепные приборы перед троганием не
натянуты до предела и всегда обладают некоторой упругостью.
Сопротивление реостата R выбирают большим, чем рассчитанное по
формуле (8), чтобы обеспечить в момент трогания небольшой ток, а
следовательно, и малую силу тяги для плавного натяжения сцепных
приборов. Затем сопротивление R постепенно уменьшают, при этомток и сила тяги соответственно растут. Число маневровых
ступеней, предшествующих пусковым, на электровозах равно четырем -
восьми.
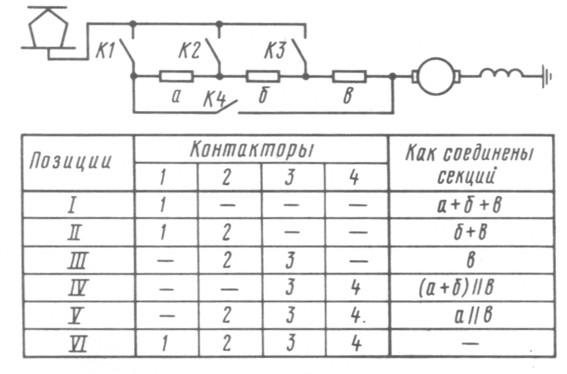
Рис. 32. Схема пускового реостата и таблица
замыкания контактов контакторов
Большое число ступеней реостата при минимальном числе контакторов
можно получить, используя различные комбинации соединений его
секций. Для того чтобы знать, на какой позиции замкнуты или
разомкнуты те или иные контакты контакторов, а следовательно, какие
секции реостата включены и каким образом, составляют таблицу
замыкания контакторов (рис. 32). Так, если замкнуть контактор К1,
при разомкнутых остальных контакторах секции а, б и в будут включены
последовательно. Замкнув контакты контактора К2, выключают секцию а;
при замкнутых контактах контактора КЗ в силовую цепь введена только
секция в.
Включив контактор К4 и предварительно выключив контакторы К1 и К2,
что не связано с разрывом электрической цепи, присоединяют секции а
и б параллельно секции в, т. е. получают четвертую ступень пуска.
Замкнув контакты контакторов К2, КЗ, К4, соединяют параллельно
секции а ив, образуя еще одну пусковую ступень, и, наконец, включив
все контакторы, выводят пусковой реостат полностью. Таким образом,
имея три секции и четыре индивидуальных контактора, получают шесть
ступеней (позиций) пускового реостата.
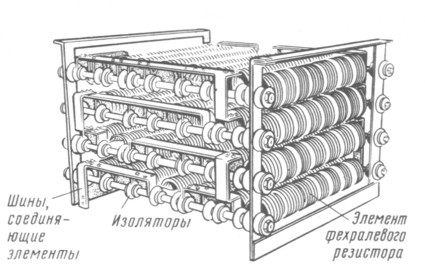
Пусковые реостаты собирают из отдельных резисторов, объединяя их в
так называемые ящики (рис. 33). Элементы пусковых резисторов
изготовляют из сплавов с большим электрическим сопротивлением.
Когда выведены все ступени реостата, на каждый из восьми
последовательно соединенных тяговых двигателей приходится напряжение
3000:8= 375 В, а на шестиосных электровозах 3000:6= = 500 В. В этом
случае электровоз работает на ходовой (безреостатной)
характеристике, подобной приведенной на рис. 11,6.
Рис. 33. Ящик пусковых фехралевых резисторов
В связи с этим вернемся к рис. 5, где показано, что от точки 0 до
точки 0' скорость возрастает по прямой, т. е. поезд движется с
равномерным ускорением. Это означает, что машинист уменьшает
сопротивление реостата, поддерживая одно и то же значение пускового
тока. От точки 0' и далее до точки А движение происходит с
выключенным реостатом по ходовой характеристике.
В процессе разгона поезда электровоз работает на реостатных
характеристиках (позициях). Время движения с включенными ступенями
реостата ограничено его нагревом. Кроме того, с увеличением этого
времени возрастают и потери электрической энергии. Каково же
соотношение расходов энергии, затрачиваемой на тягу поездов и на
потери в реостате от начала до конца разгона поезда?
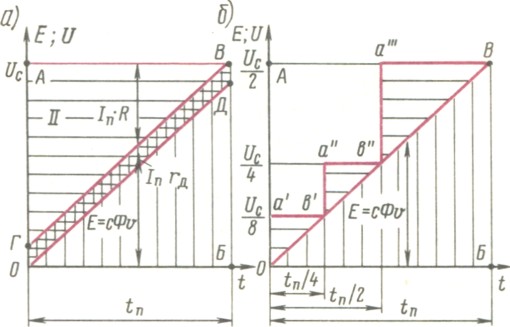
Чтобы ответить на этот вопрос, отложим в прямоугольных осях
координат (рис. 34, а) по оси ординат в выбранном масштабе
напряжение контактной сетиUс (точка Л),
по оси абсцисс - время пуска t" (точка Б). С достаточной степенью
точности можно считать, что пуск электровоза происходит при
неизменном токе In; тогда сила тяги также
постоянна, а ускорение а изменяется незначительно и может быть
принято неизменным. В соответствии с этим скорость движения в
процессе пуска будет изменяться во времени по закону v= at, а э. д.
с. двигателей Е= сФи, т. е. пропорциональна скорости, а значит,
времени.
Рис. 34. Распределение напряжения между
тяговыми двигателями и пусковым реостатом при одноступенчатом
разгоне электровоза (а) и трехступенчатом (б) для восьмиосного
электровоза
Из точек Л и Б проведем перпендикулярные осям линии до
пересечения их в точке В. В момент пуска (t- 0) напряжение
контактной сети равно сумме падений напряжения в обмотках тяговых
двигателей и в реостате, так как при v= 0 э. д. с. двигателей Е= 0.
При этом основная часть напряжения Uc падает в реостате ввиду
малости сопротивления обмоток двигателей. По оси ординат отложим
падение напряжения в обмотках двигателя (точка Г). В конце пуска
реостат полностью выведен из цепи тяговых двигателей и напряжение
контактной сети уравновешивается э. д. с. двигателей и падением
напряжения в их обмотках. Так как ток /п в процессе
пуска почти неизменен, то падение напряжения в обмотках двигателей в
конце пуска будет таким же, что и в начале его. От точки В отложим
значение этого падения напряжения - отрезок ВД. Тогда отрезок ДБ
будет соответствовать э. д. с. двигателей в конце пуска. В области
ОДВГ находятся значения напряжения на участках силовой цепи в каждый
момент времени пуска электровоза. Если значения напряжений умножить
на ток In", получим в соответствующем
масштабе мощности, а умножив их на время пуска tn,
найдем расход электроэнергии.
Площадь четырехугольника ОАВБ соответствует в определенном масштабе
расходу электроэнергии на пуск тяговых двигателей. Площадь
треугольника ВГА характеризует потерю энергии в реостате, а
равновеликая площадь треугольника О ДБ - электромагнитную энергию
двигателя. Площадь параллелепипеда ОГВД соответствует расходу
энергии на нагревание обмоток двигателей. Так как потери энергии 1\гА
сравнительно невелики, можно считать, что при пуске половина
электрической энергии расходуется на создание электромагнитной
энергии двигателей и половина теряется в реостате.
При постоянном последовательном или параллельном соединении тяговых
двигателей электровоза (см. с. 61) потери в реостатах аналогично
рассмотренному случаю будут равны половине подведенной энергии. Если
же переключить двигатели в процессе пуска при тех же пусковых токах
/п и времени пуска t" с последовательного на параллельное
соединение, доля потерь в реостате снизится. На восьмиосных
электровозах постоянного тока, работающих при напряжении в
контактной сети 3000 В, применяют три способа соединения тяговых
электродвигателей: последовательное (все восемь двигателей включены
последовательно), последовательно-параллельное (образуются две
параллельные цепи, каждая из которых содержит четыре последовательно
соединенных двигателя) и параллельное (образуются четыре
параллельные цепи по два последовательно соединенных двигателя в
каждой). Диаграмма распределения напряжения при трехступенчатом
пуске восьмиосного электровоза приведена на рис. 34, б.
Электрические потери в обмотках электродвигателей приняты равными
нулю в силу их относительной малости. Путем рассуждений, аналогичных
приведенным при построении диаграммы одноступенчатого пуска, можно
показать, что площадь ОВБ соответствует полезному расходу энергии,
т. е. электромагнитной энергии двигателя.
Площадь треугольника Оа'в' соответствует потерям энергии в реостате
при последовательном соединении тяговых двигателей. По мере разгона
электровоза потери в реостате снижаются до нуля. Напряжение Ua,
подводимое к каждому электродвигателю, в конце первой пусковой
ступени при полностью выведенном реостате равно Uc/8 (точка в').
Для продолжения разгона проводится перегруппировка двигателей (о
которой будет рассказано подробнее в следующем параграфе) с
последовательного на последовательно-параллельное соединение и
одновременно в цепь двигателей вводится, а затем постепенно
выводится пусковой реостат. Площадь треугольника в'а"в"
соответствует потерям в реостате при последовательно-параллельном
соединении тяговых двигателей. Напряжение U д, подводимое к каждому
электродвигателю, в конце разгона на второй пусковой ступени равно
Uc/4 (точка в" на рис. 34, б). Движение электровоза на каждой из
этих ступеней происходитс постоянным
током In и длится четвертую часть полного
времени разгона t" при условии равномерного ускорения.
Дальнейший разгон проводится на параллельном соединении тяговых
двигателей с тем же пусковым током /п; в цепь тока включен реостат,
который по мере увеличения скорости выводится. Площадь треугольника
в"а"'В соответствует потерям в реостате на третьей ступени разгона.
Напряжение, подводимое к тяговым двигателям, в конце пуска
становится равным Uc/2 (точка В на рис. 34, б). Разгон на третьей
ступени занимает половину полного времени разгона.
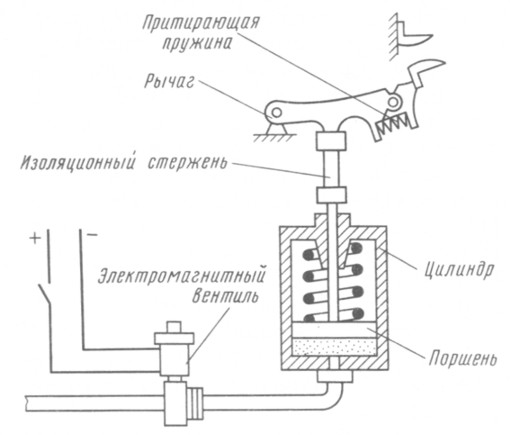
Включение, изменение сопротивления и выключение пускового реостата
производят с помощью индивидуальных электропневматических
контакторов. Познакомимся с их устройством и действием.
В таком контакторе при замыкании цепи катушки электромагнитного
вентиля включающего типа (рис. 35) открывается доступ сжатому
воздуху в цилиндр контактора. Поршень перемещается вверх и сжимает
выключающую пружину. Изоляционный стержень поворачивает рычаг с
находящимся на нем подвижным контактом. Когда подвижной контакт
коснется неподвижного, электрическая цепь замкнется, но на этом
процесс включения не закончится. Подвижной контакт и рычаг соединены
шарнирно. Между их выступами находится притирающая пружина. После
соприкосновения контактов поршень вместе со стержнем продолжает
двигаться вверх и подвижной контакт перекатывается, слегка
проскальзывая по неподвижному. Благодаря этому поверхность контактов
очищается от образовавшихся окислов.
Чтобы выключить контактор, разрывают цепь катушки
электромагнитного вентиля. При этом пружина возвращает клапаны
вентиля в исходное положение, нижняя полость цилиндра сообщается с
атмосферой, поршень под действием выключающей пружины движется вниз
и контакты размыкаются.
Контакторы с электропневматическим приводом используют в цепях с
большими токами, где требуется надежный контакт.
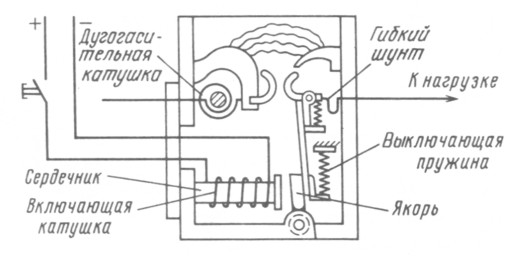
В цепях со сравнительно малыми токами применяют электромагнитные
контакторы. Для того чтобы включить такой контактор, замыкают цепь
его включающей катушки (рис. 36); под действием магнитного поля,
создаваемого ею, якорь притягивается к сердечнику и, поворачиваясь
вокруг оси, замыкает неподвижный и подвижной контакты. Одновременно
сжимается выключающая пружина. После замыкания контактов ток
проходит через дугогасительную катушку, контакты и гибкий шунт к
нагрузке.
Индивидуальные контакторы, которые осуществляют переключение в
силовой цепи под нагрузкой, оборудованы дугогасительными
устройствами.
Катушка электромагнитного вентиля электропневматического контактора
(см. рис. 35) и включающая катушка электромагнитного контактора
питаются от цепи низкого напряжения. Включение и выключение
контакторов и, следовательно, все переключения в силовых цепях
производятся замыканием и размыканием цепей питания катушек привода.
Таким образом, управление электровозов сводится к переключениям в
цепях управления, выполняемым контроллером машиниста (КМ).